É muito dificil programar um robô para, por exemplo, segurar um ovo sem quebra-lo ou pegar uma jarra cheia de suco sem derramar.Engenheiros da Universidade de Saarland ,na Alemanha parecem ter resolvido a questão passando o hardware que antes era externo para dentro da mão robótica. A miniaturização dos motores elétricos permitiu que os engenheiros simulassem a ação dos nervos da mão humana dando maior controle e precisão a mão robótica.
Artigo completo em :
http://www.inovacaotecnologica.com.br/noticias/noticia.php?artigo=mao-robotica-tendoes-artificiais&id=010180120613
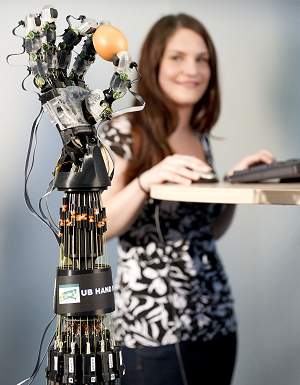 |
| Imagem: Saarland University |
|
|
|
|
|
|
|
|
|
|
Nenhum comentário:
Postar um comentário